Almost all humanoid robot training data comes from a small group of engineers, in a handful of labs, running the same narrow tasks. That works for warehouses. It doesn't work for the grandmother in rural Japan, the teacher in a Brazilian classroom, or the small restaurant owner wondering if a robot could actually help during the lunch rush.
Those people will never own a $50,000 humanoid. They'll never write a line of robot code. If the robots wait for them to come to the lab, the robots will never be ready. So we're going to them instead.
Think of it as Tamagotchi for humanoids.
You open a browser. A robot appears in simulation. You talk to it — and it moves, responds, asks for help, gets things wrong. You can change the environment, add sensors, break things on purpose to see what happens. Near-zero cost, from anywhere in the world, no hardware required. That's Simulation as a Service.
We didn't build a new simulator from scratch. We assembled the best tools that already exist — physics engines, world models, VLA architectures — and wrapped them in a single interface anyone can use. The interesting part isn't the technology. It's the first time a nurse, a mechanic, or a school principal talks to a robot and realises they could actually teach it something.
SimaaS in action — watch the demo
When simulation isn't enough, the real thing is one click away.
Sometimes you need to feel the limits of actual hardware. Our warehouse runs a fleet of physical robots — Unitree, Figure, SO-ARM101, Panda, and more — accessible remotely through cameras, telemetry, and live control. Pay per minute. No procurement, no shipping, no setup. That's Robot as a Service.
A school doesn't need to bet $8,000 on hardware before testing anything. On our platform, they can run the same task on three different robots in an afternoon — compare which AI behaves best, and start building their own policies by talking to an AI, step by step, without writing a single line of code.

SimaaS restaurant simulator — multiple Origami agents, live telemetry
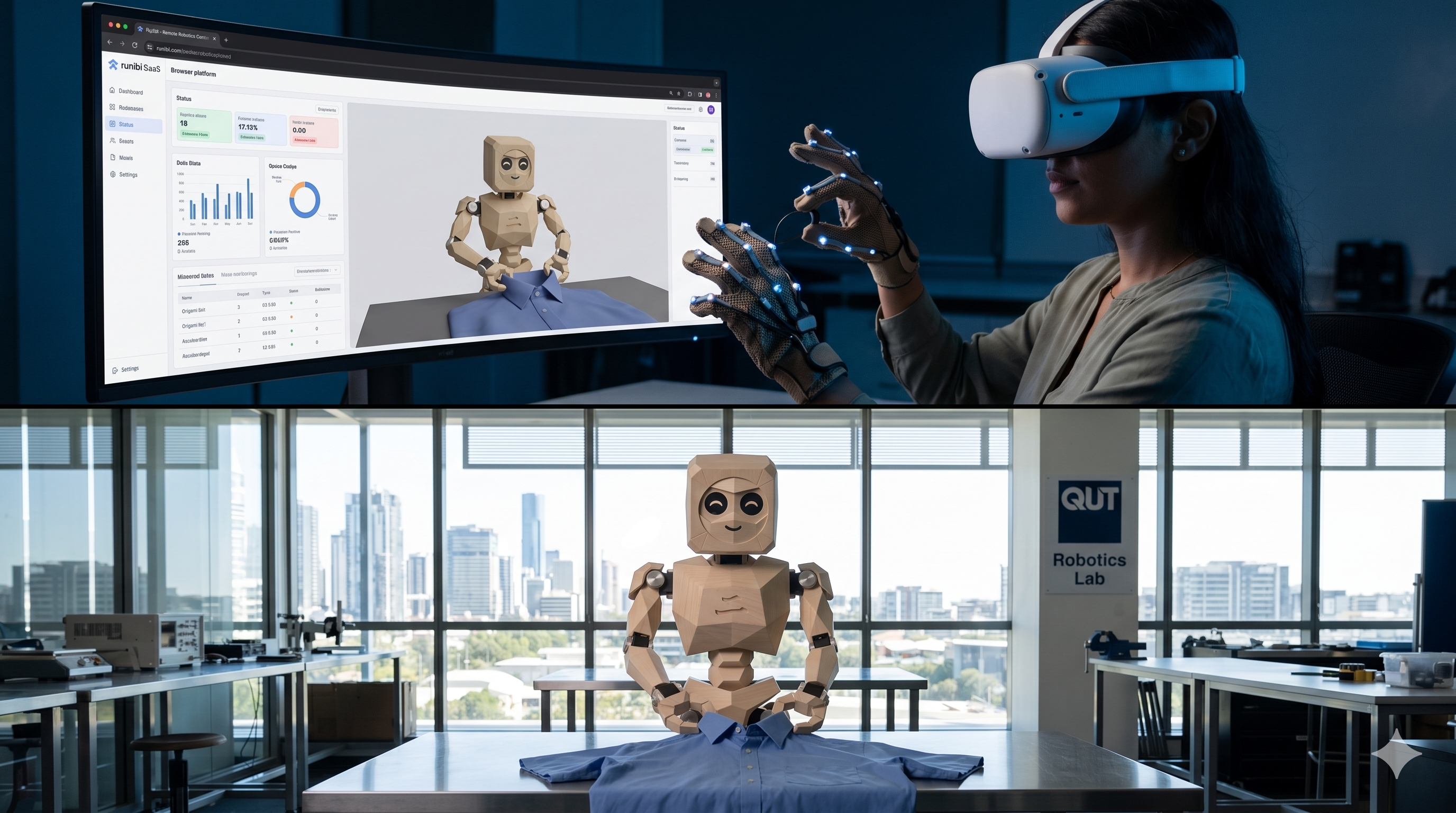
Robot as a Service — teleoperation at QUT Robotics Lab
What the loop actually produces.
Every session — every question, every correction, every failed task and frustrated retry — becomes signal. From teachers, caregivers, mechanics, small business owners, students. People whose knowledge has never made it into a robot before.
That's the data that teaches robots to work with people rather than for them. And it's the data that makes everything else we're building possible.